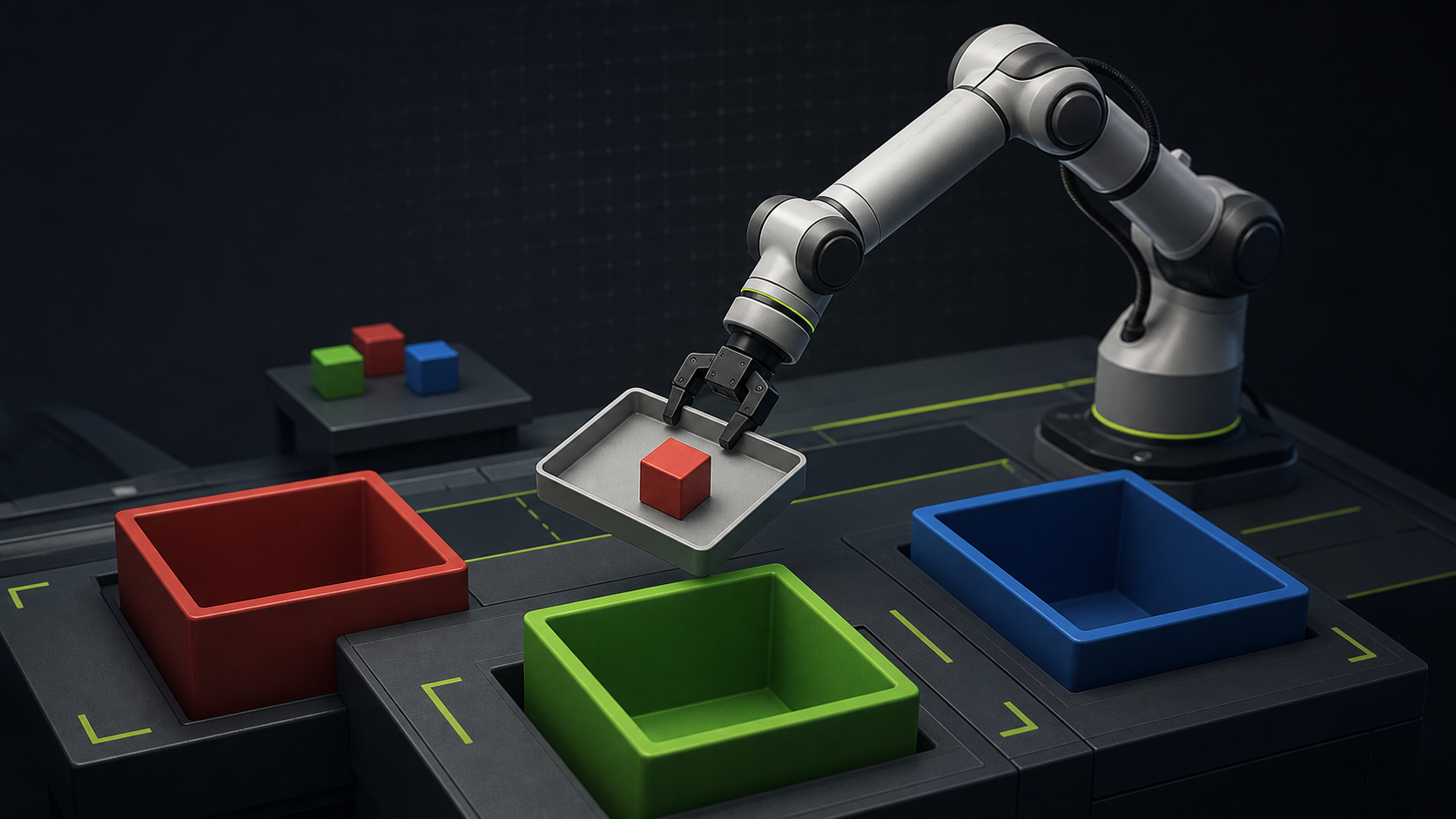
When Behavior Cloning Cheats
A simulated bin-sorting robot revealed how imitation policies can memorize shortcuts instead of grounding actions in scene geometry.
I build physically grounded robots for manipulation, dynamics modeling, and sim-to-real work. Currently finishing a PhD in Robotics Engineering at WPI.

My PhD work at Worcester Polytechnic Institute is on active perception and parameter estimation for robot manipulation. My goal is enabling robots to figure out how to interact with new objects they've never encountered before — without being told in advance.
My background is rooted in analytical, model-based methods — robot dynamics, sim2real transfer, and model-based control. I'm increasingly combining these with modern machine learning to build systems that are both physically grounded and data-driven.
Before my PhD, I deployed and programmed autonomous mobile robots for Fortune 500 clients at Seegrid. I hold a B.S. in Mechanical Engineering from Columbia University. I'm looking for research engineer roles where physical grounding matters — where simulation meets hardware and systems ship.
Also presented at New England Manipulation Symposium 2025 — oral presentation of the CASE 2025 work.
A simulated bin-sorting robot revealed how imitation policies can memorize shortcuts instead of grounding actions in scene geometry.
A graph-based multi-robot task allocation system for distributing robots around a manipulated payload in real time.
A low-level OpenGL haptics simulation that models contact forces and physical constraints for real-time tactile feedback.
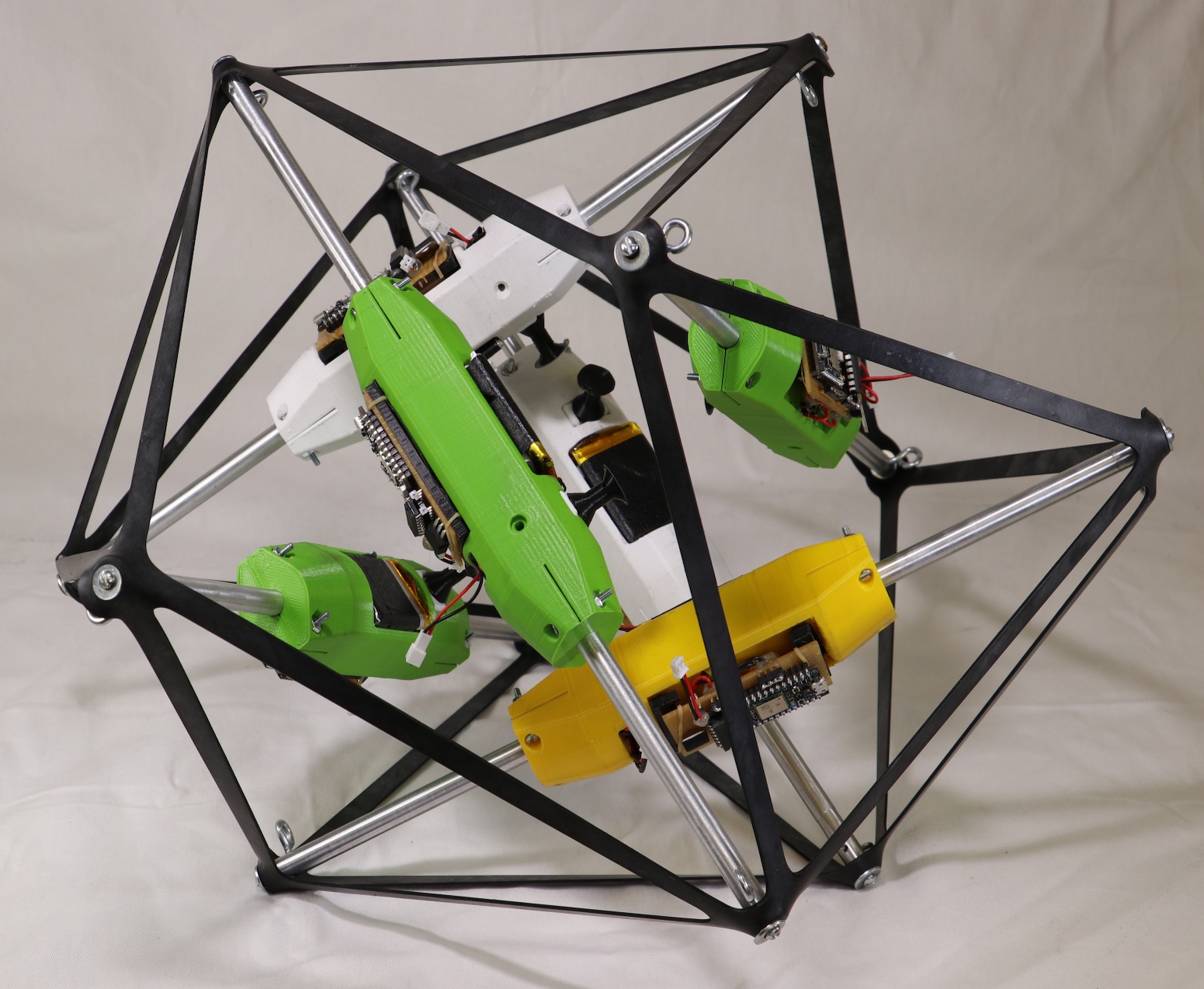
A Columbia capstone rover prototype using tensile integrity to survive impacts without a rigid outer shell.
I'm actively looking for research engineer and applied scientist roles in robotics and robot learning, based in Boston. Open to relocation for the right opportunity.