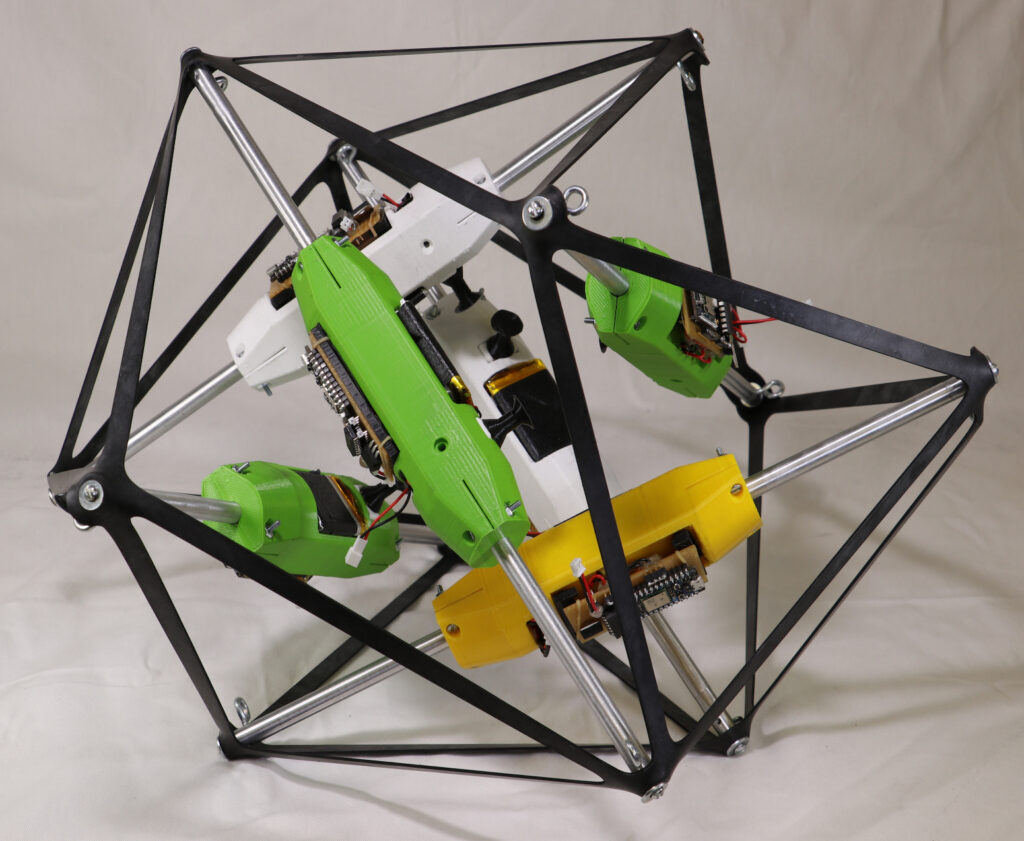
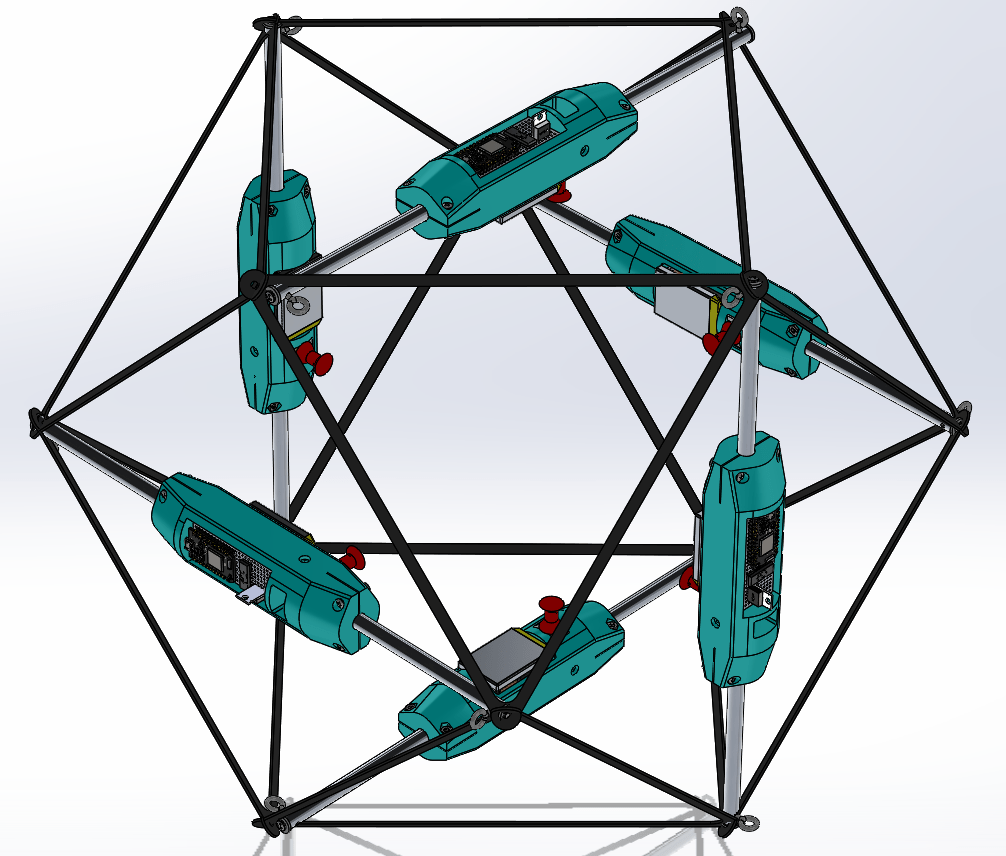
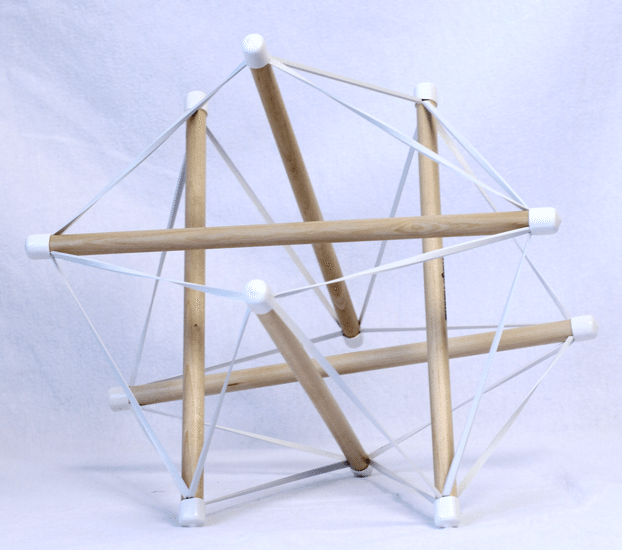
Tensegrity structures are a series of struts that are held in compression by a set of cables that are held in tension. For this project, we aim to actuate these cables to induce a tumbling motion, hence the project’s name: The Tumbleweed.
Thegoal of this project was to create a proof-of-concept replacement to the Mars rover. The benefits of a tensegrity robot is fourfold: lightweightmeans it is easily deployable on space missions, compressible allows for deployment from extreme altitudes without damage, stability means ease of traversing on extra-planetary missions, and cost-effective allows for an army of robots to be deployed for reconnaissance.
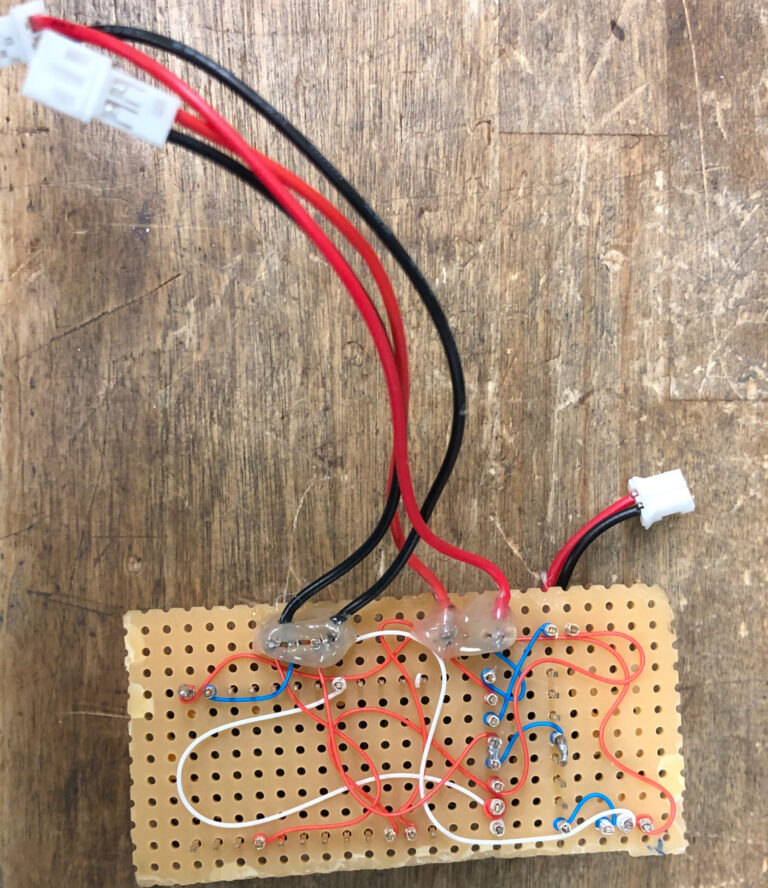
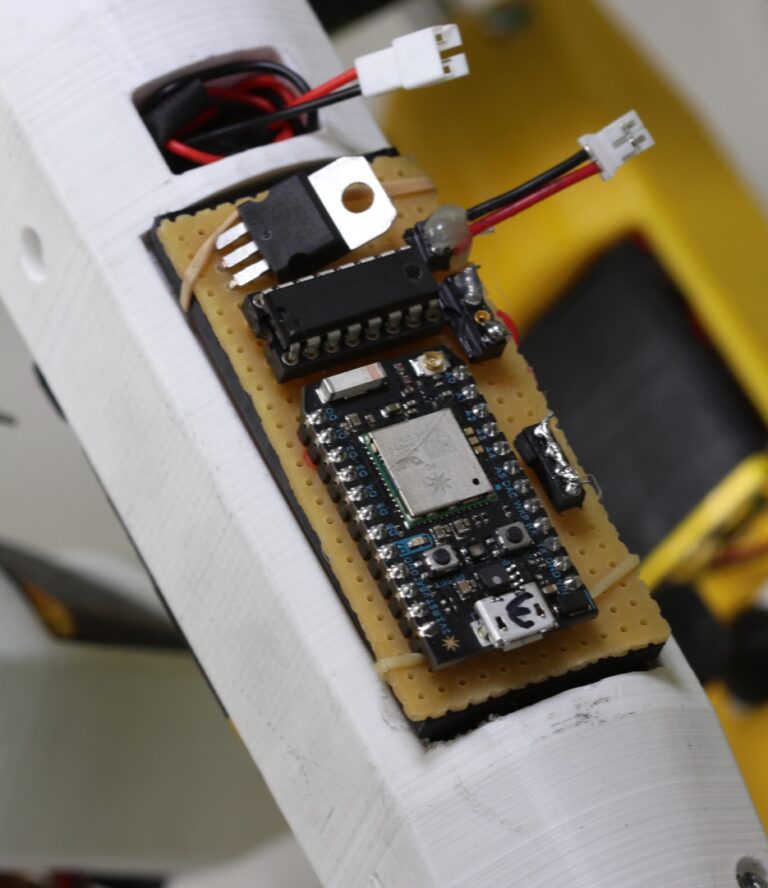
My senior design team used wire-wrapping to assemble our custom circuits. The circuits were all controlled by a microcontroller equipped with IoT capabilities, known as the Particle Photon. In order to control the motors, we used an H-Bridge powered by the L293D chip.
We uploaded an algorithm to the Photon that would allow traversal of terrain through tacking step by step. By alternating which motors retracted the spools, linear motion could be achieved!
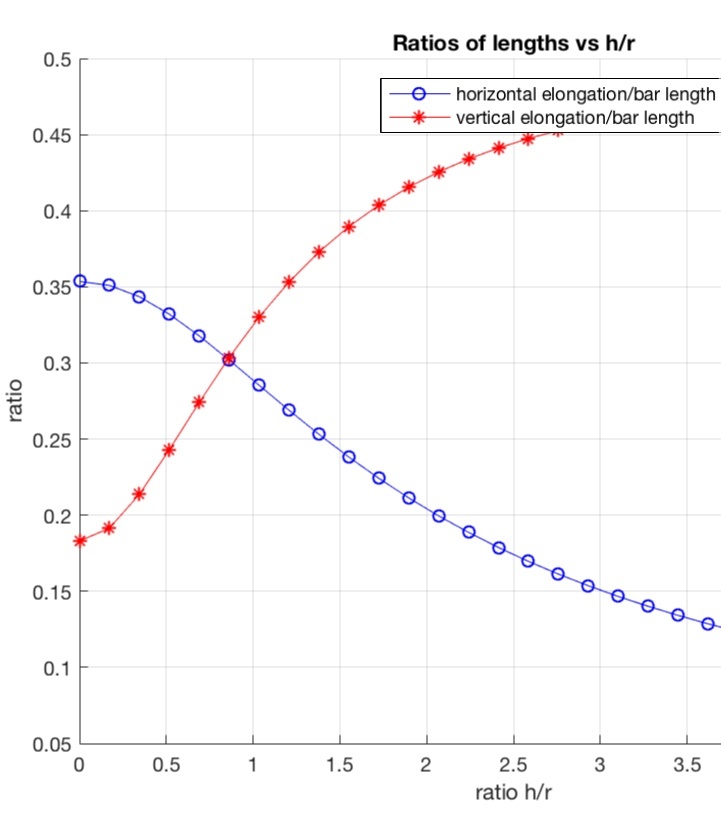
There was a long iterative design process that was conducted, after calculations were performed. The calculations were designed to determine the size of the struts according to an optimization algorithm
Setup
The Tumbleweed was designed to withstand an impact of 2 meters. In an actual aerospace application, ideally the system would be able to withstand an impact from being dropped from orbit to a planet’s surface. CLICK HERE for our paper.
In the video to the right, you can see the robot in action! ⇒